特征融合方式¶

约 104 个字 594 行代码 9 张图片 预计阅读时间 8 分钟
增:attention,skip connection
删
改:conv,Pooling(up,down)
查:查看别人的连接方式
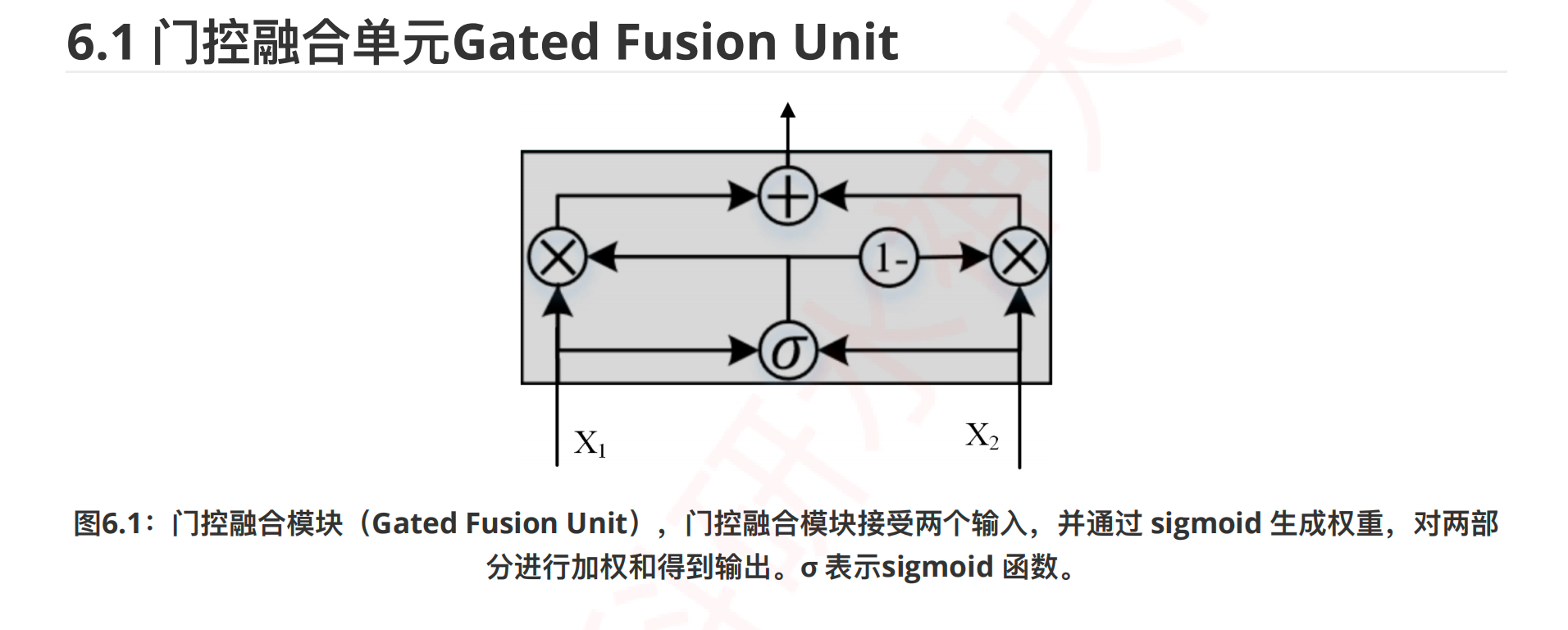
门控融合机制¶
Python
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
# DONE
class gatedFusion(nn.Module):
def __init__(self, dim):
super(gatedFusion, self).__init__()
self.fc1 = nn.Linear(dim, dim, bias=True)
self.fc2 = nn.Linear(dim, dim, bias=True)
def forward(self, x1, x2):
print("x1.shape",x1.shape)
print("x2.shape",x2.shape)
x11 = self.fc1(x1)
print("x11.shape",x11.shape)
x22 = self.fc2(x2)
print("x22.shape",x22.shape)
# 通过门控单元生成权重表示
z = torch.sigmoid(x11+x22)
print("z.shape",z.shape)
# 对两部分输入执行加权和
out = z*x1 + (1-z)*x2
return out
if __name__ == '__main__':
# 时间序列: (B, N, T, C)
# x1 = torch.randn(1, 10, 24, 64)
# x2 = torch.randn(1, 10, 24, 64)
# 图像:(B,H,W,C)
x1 = torch.randn(1,224,224,64)
x2 = torch.randn(1,224,224,64)
Model = gatedFusion(dim=64)
out = Model(x1,x2)
print("out.shape",out.shape)
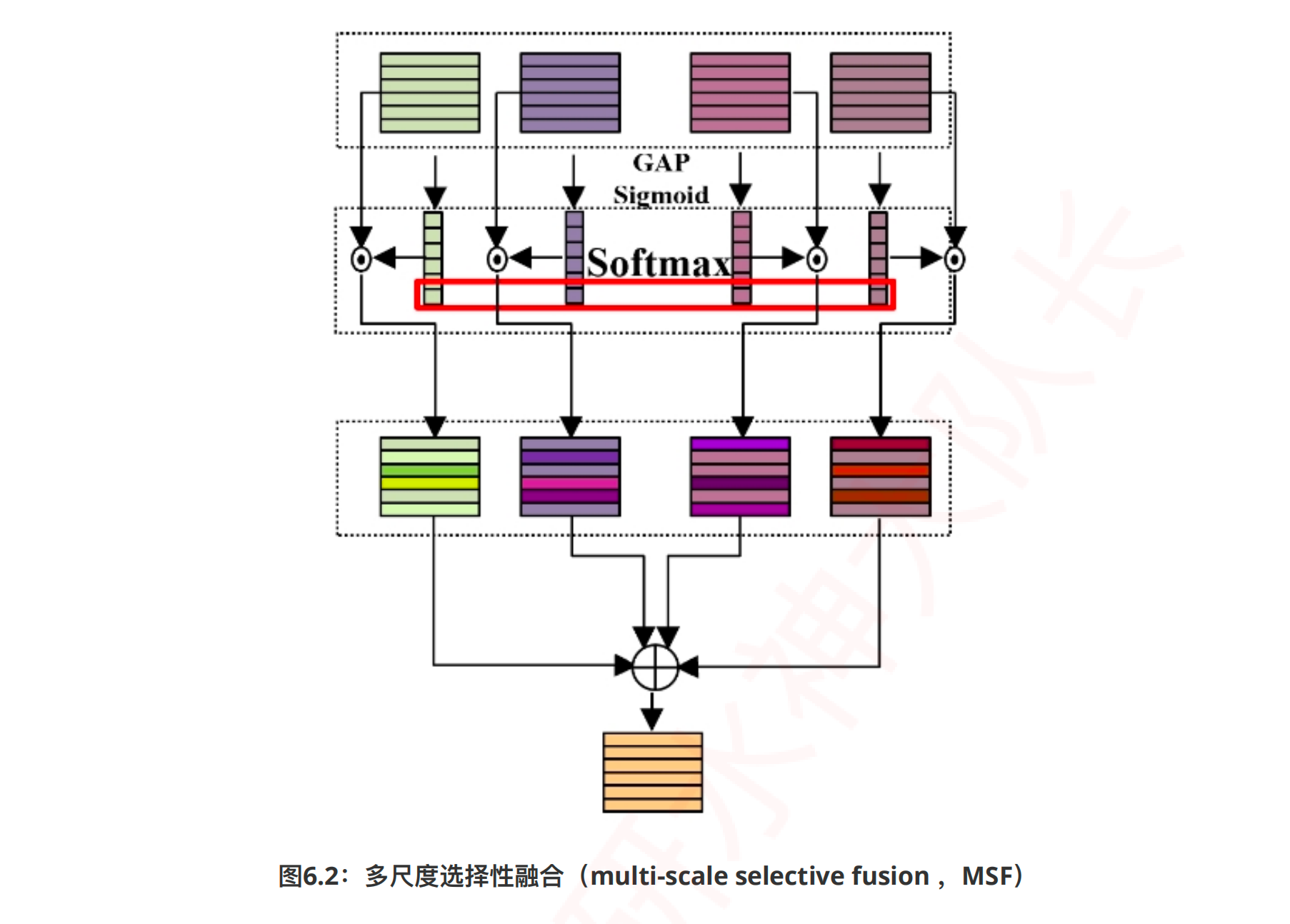
多尺度选择性融合¶
Python
import math
import torch.nn as nn
import torch
import math
import torch.nn.functional as F
"""SHISRCNet: Super-resolution And Classification Network For Low-resolution Breast Cancer Histopathology Image"""
# DONE 这个结构还行,也可以改奥,很多地方都可以改,加个串并联什么的,或者把 6_1 套进来,重新画个图
class oneConv(nn.Module):
# 卷积+ReLU函数
def __init__(self, in_channels, out_channels, kernel_sizes, paddings, dilations):
super().__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = kernel_sizes, padding = paddings, dilation = dilations, bias=False),###, bias=False
# nn.BatchNorm2d(out_channels),
# nn.ReLU(inplace=True),
)
def forward(self, x):
x = self.conv(x)
return x
class MSFblock(nn.Module):
def __init__(self, in_channels):
super(MSFblock, self).__init__()
out_channels = in_channels
self.project = nn.Sequential(
nn.Conv2d(out_channels, out_channels, 1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),)
#nn.Dropout(0.5))
self.gap = nn.AdaptiveAvgPool2d(1)
self.softmax = nn.Softmax(dim = 2)
self.Sigmoid = nn.Sigmoid()
self.SE1 = oneConv(in_channels,in_channels,1,0,1)
self.SE2 = oneConv(in_channels,in_channels,1,0,1)
self.SE3 = oneConv(in_channels,in_channels,1,0,1)
self.SE4 = oneConv(in_channels,in_channels,1,0,1)
def forward(self, x0,x1,x2,x3):
# x1/x2/x3/x4: (B,C,H,W)
y0 = x0
y1 = x1
y2 = x2
y3 = x3
# 通过池化聚合全局信息,然后通过1×1conv建模通道相关性: (B,C,H,W)-->GAP-->(B,C,1,1)-->SE1-->(B,C,1,1)
print(self.gap(x0))
y0_weight = self.SE1(self.gap(x0))
print(y0_weight)
y1_weight = self.SE2(self.gap(x1))
y2_weight = self.SE3(self.gap(x2))
y3_weight = self.SE4(self.gap(x3))
# 将多个尺度的全局信息进行拼接: (B,C,4,1) # 小括号里面有1个数,有 4 个小括号,C 个 4×1 的矩阵
weight = torch.cat([y0_weight,y1_weight,y2_weight,y3_weight],2)
print(weight)
# 首先通过sigmoid函数获得通道描述符表示, 然后通过softmax函数,求每个尺度的权重: (B,C,4,1)--> (B,C,4,1)
# 每个通道 4 种表示,先得到每种表示的绝对大小,然后得到相对大小
# sigmoid 绝对的大小,softmax相对大小
weight = self.softmax(self.Sigmoid(weight))
print(weight.shape) # torch.Size([4, 3, 4, 1]) # 得到 3 个通道 4 种表示的权重
# weight[:,:,0]:(B,C,1); (B,C,1)-->unsqueeze-->(B,C,1,1)
y0_weight = torch.unsqueeze(weight[:,:,0],2)
print(y0_weight) # unsqueeze 后的1 个数表示一张图H和 W 的权重(完全可以改成坐标注意力)
# 通道描述符只建模了通道之间的相关性
print(y0_weight.shape) # torch.Size([4, 3, 1, 1])
# 小括号里面有 1 个数,有 1 个小括号,有 3 个矩阵。
y1_weight = torch.unsqueeze(weight[:,:,1],2)
y2_weight = torch.unsqueeze(weight[:,:,2],2)
y3_weight = torch.unsqueeze(weight[:,:,3],2)
# 每张图,3 个特征,4 个特征表示的重要性权重
# 一堂课,3 个老师,每个老师的不同侧重点,学生学到的=class*teacher1_attn1+......
# 将权重与对应的输入进行逐元素乘法: (B,C,1,1) * (B,C,H,W)= (B,C,H,W), 然后将多个尺度的输出进行相加
x_att = y0_weight*y0+y1_weight*y1+y2_weight*y2+y3_weight*y3
return self.project(x_att)
if __name__ == '__main__':
# (B,C,H,W)
# x0 = torch.rand(1, 64, 192, 192)
# x1 = torch.rand(1, 64, 192, 192)
# x2 = torch.rand(1, 64, 192, 192)
# x3 = torch.rand(1, 64, 192, 192)
# Model = MSFblock(in_channels=64)
x0 = torch.rand(4, 3, 2, 2)
x1 = torch.rand(4, 3, 2, 2)
x2 = torch.rand(4, 3, 2, 2)
x3 = torch.rand(4, 3, 2, 2)
# bs=4,channel=RGB=3,size=(2,2)
Model = MSFblock(in_channels=3)
# print(Model)
out = Model(x0,x1,x2,x3)
print(out.shape)
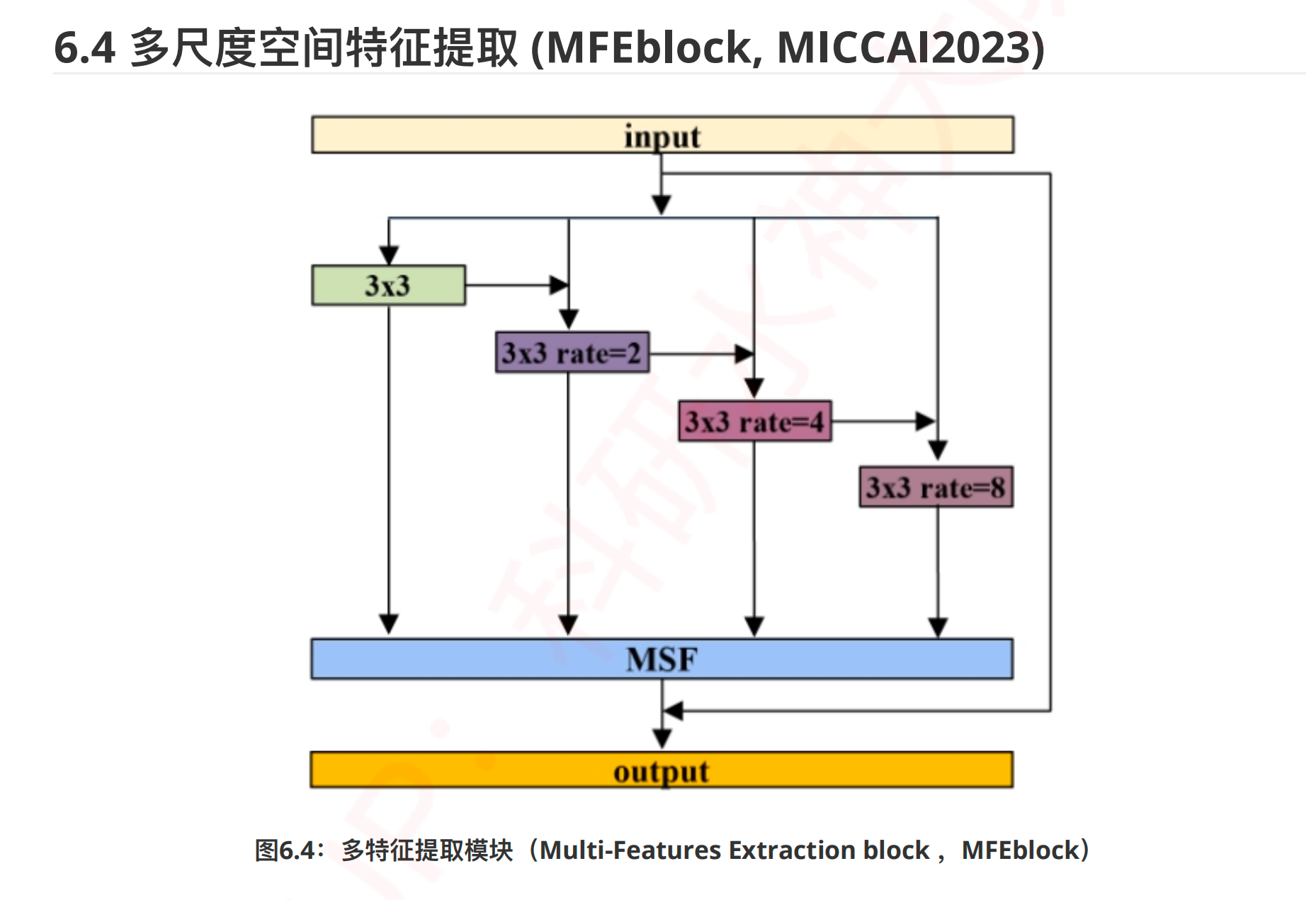
多尺度空间特征提取¶
Python
import math
import torch.nn as nn
import torch
import math
import torch.nn.functional as F
"""SHISRCNet: Super-resolution And Classification Network For Low-resolution Breast Cancer Histopathology Image"""
# 多尺度空间特征提取
# DONE 先空间(conv)建模,又通道建模(Channel)
class oneConv(nn.Module):
# 卷积+ReLU函数
def __init__(self, in_channels, out_channels, kernel_sizes, paddings, dilations):
super().__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = kernel_sizes, padding = paddings, dilation = dilations, bias=False),###, bias=False
# nn.BatchNorm2d(out_channels),
# nn.ReLU(inplace=True),
)
def forward(self, x):
x = self.conv(x)
return x
class ASPPConv(nn.Sequential):
def __init__(self, in_channels, out_channels, dilation):
modules = [
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=dilation, dilation=dilation, bias=False),#groups = in_channels
nn.BatchNorm2d(out_channels),
nn.ReLU()
]
super(ASPPConv, self).__init__(*modules)
class MFEblock(nn.Module):
def __init__(self, in_channels, atrous_rates):
super(MFEblock, self).__init__()
out_channels = in_channels
# modules = []
# modules.append(nn.Sequential(
# nn.Conv2d(in_channels, out_channels, 1, bias=False),
# nn.BatchNorm2d(out_channels),
# nn.ReLU()))
rate1, rate2, rate3 = tuple(atrous_rates)
self.layer1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, padding=1, dilation=1, bias=False),#groups = in_channels , bias=False
nn.BatchNorm2d(out_channels),
nn.ReLU())
self.layer2 = ASPPConv(in_channels, out_channels, rate1)
self.layer3 = ASPPConv(in_channels, out_channels, rate2)
self.layer4 = ASPPConv(in_channels, out_channels, rate3)
self.project = nn.Sequential(
nn.Conv2d(out_channels, out_channels, 1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),)
#nn.Dropout(0.5))
self.gap = nn.AdaptiveAvgPool2d(1)
self.softmax = nn.Softmax(dim = 2)
self.Sigmoid = nn.Sigmoid()
self.SE1 = oneConv(in_channels,in_channels,1,0,1)
self.SE2 = oneConv(in_channels,in_channels,1,0,1)
self.SE3 = oneConv(in_channels,in_channels,1,0,1)
self.SE4 = oneConv(in_channels,in_channels,1,0,1)
def forward(self, x):
# x: (B,C,H,W)
print("x.shape")
print(x.shape)
### 多特征提取: Multi-Features Extraction block, MFEblock
y0 = self.layer1(x) # 第一个分支的输入只有x: (B,C,H,W)-->(B,C,H,W)
y1 = self.layer2(y0+x) # 第二个分支的输入是y0和x: (B,C,H,W)-->(B,C,H,W)
y2 = self.layer3(y1+x) # 第三个分支的输入是y1和x: (B,C,H,W)-->(B,C,H,W)
y3 = self.layer4(y2+x) # 第四个分支的输入是y2和x: (B,C,H,W)-->(B,C,H,W)
# 先提取多特征(kerkel_size),再多尺度特征融合(加权重)
### 多尺度融合, multi-scale selective fusion, MSF
# 通过池化聚合全局信息,然后通过1×1conv建模通道相关性: (B,C,H,W)-->GAP-->(B,C,1,1)-->SE1-->(B,C,1,1)
y0_weight = self.SE1(self.gap(y0))
y1_weight = self.SE2(self.gap(y1))
y2_weight = self.SE3(self.gap(y2))
y3_weight = self.SE4(self.gap(y3))
# 将多个尺度的全局信息进行拼接: (B,C,4,1)
weight = torch.cat([y0_weight,y1_weight,y2_weight,y3_weight],2)
# 首先通过sigmoid函数获得通道描述符表示, 然后通过softmax函数,求每个尺度的权重: (B,C,4,1)--> (B,C,4,1)
weight = self.softmax(self.Sigmoid(weight))
# weight[:,:,0]:(B,C,1); (B,C,1)-->unsqueeze-->(B,C,1,1)
y0_weight = torch.unsqueeze(weight[:,:,0],2)
y1_weight = torch.unsqueeze(weight[:,:,1],2)
y2_weight = torch.unsqueeze(weight[:,:,2],2)
y3_weight = torch.unsqueeze(weight[:,:,3],2)
# 将权重与对应的输入进行逐元素乘法: (B,C,1,1) * (B,C,H,W)= (B,C,H,W), 然后将多个尺度的输出进行相加
x_att = y0_weight*y0+y1_weight*y1+y2_weight*y2+y3_weight*y3
return self.project(x_att+x) # 加了一个残差连接
if __name__ == '__main__':
# (B,C,H,W)
x = torch.rand(1, 64, 192, 192)
# atrous_rates: 扩张率
Model = MFEblock(in_channels = 64,atrous_rates = [2,4,8])
out = Model(x)
print("out.shape")
print(out.shape) # torch.Size([1, 64, 192, 192])
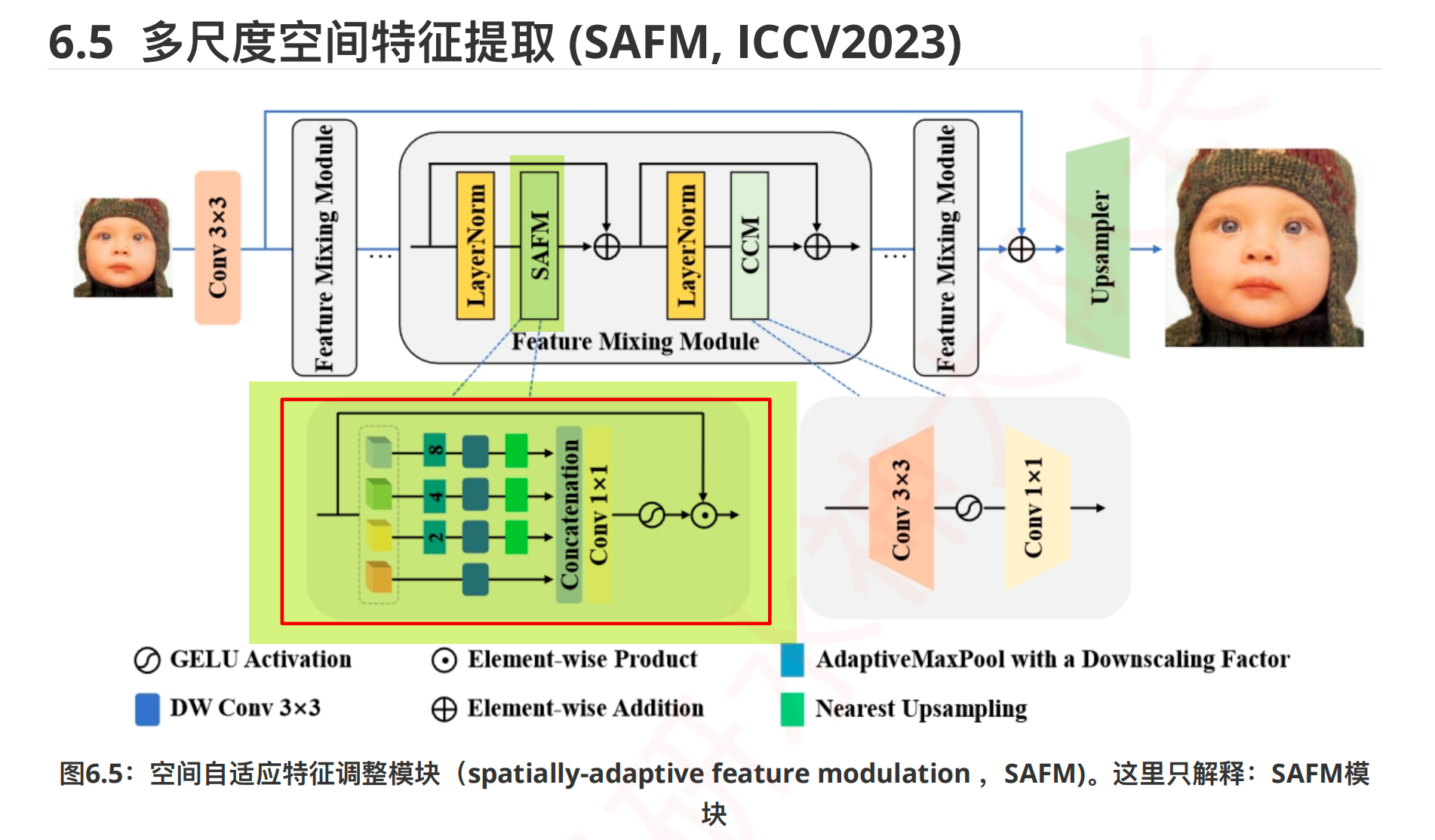
多尺度空间特征提取¶
Python
import torch
import torch.nn as nn
import torch.nn.functional as F
"Spatially-Adaptive Feature Modulation for Efficient Image Super-Resolution"
# DONE 卷积,采样,插值,模块可以改,可以加注意力
# 增删改查,查:借鉴这个框架,封自己的模块,再重新画图
# SAFM
class SAFM(nn.Module):
def __init__(self, dim, n_levels=4):
super().__init__()
# 表示有多少个尺度
self.n_levels = n_levels
# 每个尺度的通道是多少
chunk_dim = dim // n_levels
# Spatial Weighting
self.mfr = nn.ModuleList([nn.Conv2d(chunk_dim, chunk_dim, 3, 1, 1, groups=chunk_dim) for i in range(self.n_levels)])
# Feature Aggregation
self.aggr = nn.Conv2d(dim, dim, 1, 1, 0)
# Activation
self.act = nn.GELU()
def forward(self, x):
# (B,C,h,w)
h, w = x.size()[-2:]
print("x.shape:",x.shape)
print("分成几份:",self.n_levels)
# 将通道平均分为n_levels份,n_levels是尺度的个数: (B,C,h,w) --chunk--> (B,C/n_levels,h,w)
xc = x.chunk(self.n_levels, dim=1)
print("xc[0].shape:",xc[0].shape)
print("xc[1].shape:",xc[1].shape)
print("xc[2].shape:",xc[2].shape)
print("xc[3].shape:",xc[3].shape)
# 注意一下怎么索引的
out = []
# 遍历多个尺度,四个尺度的下采样比例是[1,2,4,8],第一个尺度保持原有分辨率,因此从第二个尺度开始遍历
for i in range(self.n_levels):
if i > 0:
p_size = (h// 2**i, w//2**i)
# 1th: p_size=(h/2,w/2);
# 2th: p_size=(h/4,w/4);
# 3th: p_size=(h/8,w/8)
s = F.adaptive_max_pool2d(xc[i], p_size)
# 以1th为例, 执行最大池化: (B,C/n_levels,h,w) --> (B,C/n_levels,h/2,w/2)
s = self.mfr[i](s)
# 执行3×3的深度卷积: (B,C/n_levels,h/2,w/2) --> (B,C/n_levels,h/2,w/2)
s = F.interpolate(s, size=(h, w), mode='nearest')
#通上采样恢复与输入相同的shape:(B,C/n_levels,h/2,w/2) --> (B,C/n_levels,h,w)
else:
s = self.mfr[i](xc[i])
# 0th: 第一个尺度保持原有分辨率(h,w), 然后执行3×3的深度卷积: (B,C/n_levels,h,w)--> (B,C/n_levels,h,w)
out.append(s)
# 将四个尺度的输出在通道上拼接,恢复原shape: (B,C,h,w), 然后通过1×1Conv来聚合多个子空间的不同尺度的通道特征:
out = self.aggr(torch.cat(out, dim=1))
# 通过gelu激活函数进行规范化,来得到注意力图,然后与原始输入执行逐元素乘法(空间上的多尺度池化会造成空间上的信息丢失,通过与原始输入相乘能够保留一些空间上的细节), 得到最终输出
out = self.act(out) * x
return out
if __name__ == '__main__':
# (B,C,H,W)
x = torch.randn(1, 36, 224, 224)
Model = SAFM(dim=36)
out = Model(x)
print(out.shape)
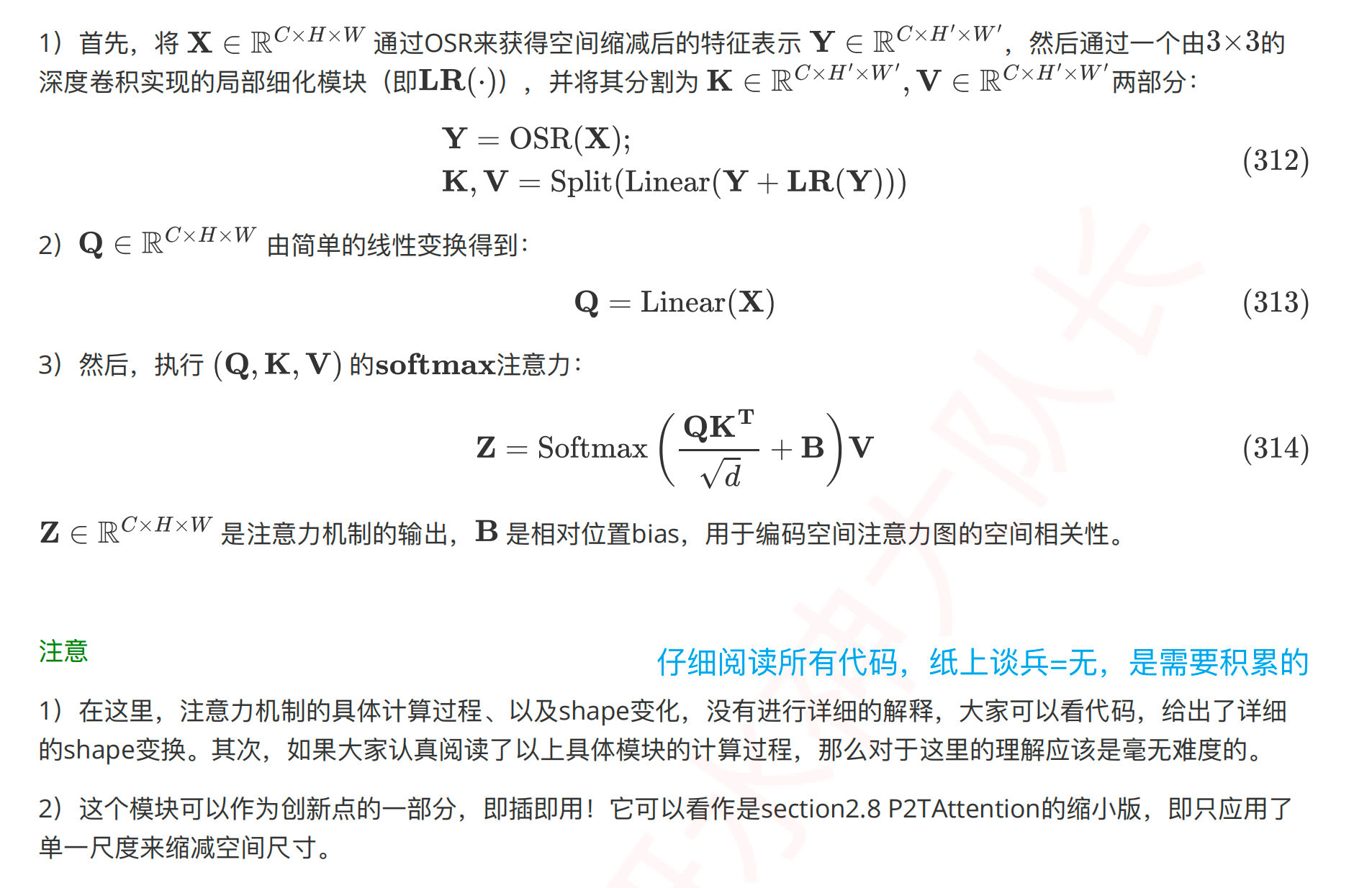
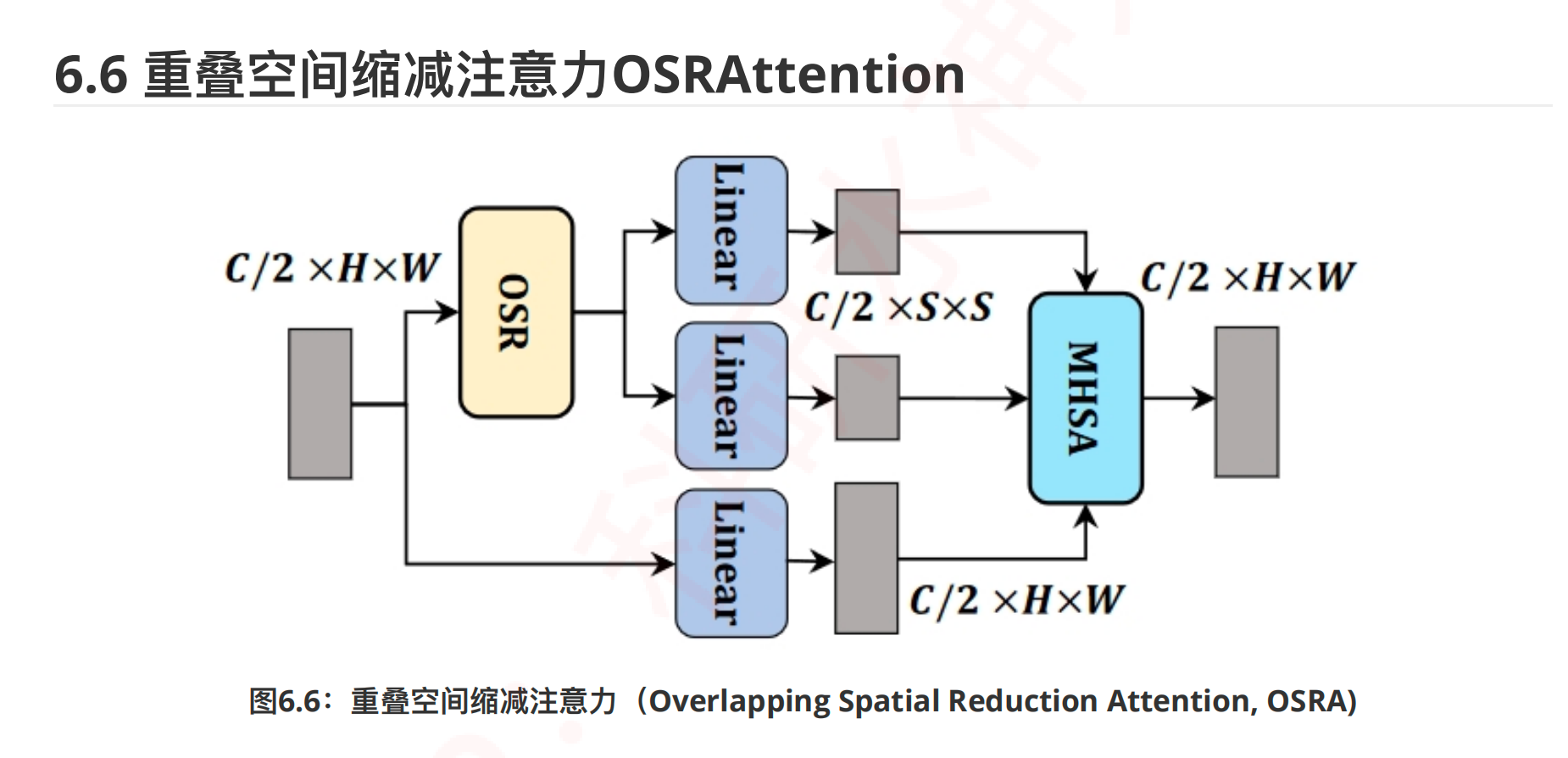
重叠空间缩减注意力¶

Python
import math
import torch.nn as nn
import torch
import itertools
import torch.nn.functional as F
# from mmcv.cnn.bricks import ConvModule
"TransXNet: Learning Both Global and Local Dynamics with a Dual Dynamic Token Mixer for Visual Recognition"
class OSRAttention(nn.Module): ### OSRA
def __init__(self, dim,
num_heads=8,
qk_scale=None,
attn_drop=0,
sr_ratio=2,):
super().__init__()
assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.sr_ratio = sr_ratio
self.q = nn.Conv2d(dim, dim, kernel_size=1)
self.kv = nn.Conv2d(dim, dim*2, kernel_size=1)
# 对于图来说,qkv 是卷积得到的,并且卷积核尺寸都是 1 × 1 的,不改变 特征图的尺寸,也就是不改变词的个数
# 但这个模块有点特殊,对于 kv 降维了
self.attn_drop = nn.Dropout(attn_drop)
if sr_ratio > 1:
# sr_ratio=2 2+3//2=2
# output_size = h-k+s+2p/s = 7-5+2+2*2/2=8/2=4
# x.shape = [1, 64, 7, 7]
# 分组不影响 输出特征图的大小,影响卷积核的通道数,也就是影响卷积运算的参数量
self.sr = nn.Sequential(
nn.Conv2d(dim, dim,kernel_size=sr_ratio+3,stride=sr_ratio,padding=(sr_ratio+3)//2,groups=dim,bias=False),
nn.BatchNorm2d(dim),
nn.ReLU(),
# ConvModule(dim, dim,
# kernel_size=sr_ratio+3,
# stride=sr_ratio,
# padding=(sr_ratio+3)//2,
# groups=dim,
# bias=False,
# norm_cfg=dict(type='BN2d'),
# act_cfg=dict(type='GELU')),
# ConvModule(dim, dim,
# kernel_size=1,
# groups=dim,
# bias=False,
# norm_cfg=dict(type='BN2d'),
# act_cfg=None,),)
nn.Conv2d(dim, dim, kernel_size=1, groups=dim, bias=False),# 分组卷积不会改变输出特征的尺寸,只会影响单个卷积核的通道数,也就是减少单个卷积的参数量,从而影响整个卷积操作的参数量
nn.BatchNorm2d(dim),)
else:
self.sr = nn.Identity()
self.local_conv = nn.Conv2d(dim, dim, kernel_size=3, padding=1, groups=dim)
def forward(self, x, relative_pos_enc=None):
B, C, H, W = x.shape
# print(x.shape) # torch.Size([1, 64, 7, 7])
# 图的多头注意力机制 拆分的是通道
q = self.q(x).reshape(B, self.num_heads, C//self.num_heads, -1).transpose(-1, -2)
# print(self.q(x).shape) # torch.Size([1, 64, 7, 7])
# B = 1; self.num_heads = 8; C=64; C//self.num_heads=8;
# print(self.q(x).reshape(B, self.num_heads, C//self.num_heads, -1).shape)
# # torch.Size([1, 8, 8, 49]) → 1 个 batch size;
# 8个头(每个头分别学习不重叠的通道,8 个老师,课本分成 8 章,每个老师教一章);
# 每个头学习 8 个通道;每个通道学习的内容 H*W=7*7 = 49
# print(q.shape) # torch.Size([1, 8, 49, 8])
# 对输入x进行变换得到q,然后通过reshape重塑shape:
# (B,C,H,W)--q()->(B,C,H,W)--reshape-->(B,h,d,HW) --transpose--> (B,h,HW,d); C=h*d
# self.q = nn.Conv2d(dim, dim, kernel_size=1)
# 1×1 卷积不改变特征图大小 padding=kernel_size // 2 → 不变卷积
# 字母说明:B: batch size
# h = num_heads
# d = head_dim = C // self.num_heads 每个头的维度,相当于每个头分配的通道数,对于图来说,通道数 相当于特征数
# HW 图的高度乘以宽度相当于序列长度 相当于每个 pixel 表达语义
# (现实含义)所以这里 q.shape = [1,8,49,8]的意思是,bs=1,heads=8(8句话),每句话 49 个词(pixel),每个 pixel(词),的特征维 8
# 通过OSR操作得到k/v表示
kv = self.sr(x)
# 执行空间缩减(spatial reduction)操作,也就是通过卷积来实现下采样,得到kv: (B,C,H,W)-->(B,C,H‘,W’)
# print(x.shape) # torch.Size([1, 64, 7, 7])
# self.sr = nn.Sequential
# print(kv.shape) # torch.Size([1, 64, 4, 4])
# self.sr实现了什么功能 答:(空间缩减,减小特征图的尺寸)
# 为什么要 减少特征图尺寸?
kv = self.local_conv(kv) + kv
# 通过3×3卷积对局部空间建模,并添加残差连接: (B,C,H‘,W’)-->(B,C,H‘,W’)
# self.local_conv = nn.Conv2d(dim, dim, kernel_size=3, padding=1, groups=dim)
# padding = 1 = 3//2 = 1 所以这个是不变卷积,也就是输入特征图尺寸和输出特征图尺寸相同
# 处理后的 kv.shape = torch.Size([1, 64, 4, 4])
# 为什么要有这一步? (缩减空间,看模块的设计动机)
k, v = torch.chunk(self.kv(kv), chunks=2, dim=1)
#分割为k、v: (B,C,H‘,W’)--kv()-->(B,2C,H‘,W’)--chunk--> k:(B,C,H‘,W’); v:(B,C,H‘,W’)
# self.kv = nn.Conv2d(dim, dim*2, kernel_size=1) 卷积核尺寸为 1,不改变输出特征图的大小,通道数翻倍
# 通道数翻倍以后,又划分成 2 组,又恢复通道数 C,分别分配给k,v
# chunk后的 k.shape = 1,64,4,4 ; v.shape = 1,64,4,4
k = k.reshape(B, self.num_heads, C//self.num_heads, -1)
# (B,C,H‘,W’) --reshape--> (B,h,d,H'W'); c=h*d
# 分给多头,8 个头,每个头 8 通道
# reshape后的 k.shape = 1,8,8,16 bs=1,heads=8,head_dim=8,H'W'=16 16个词,每个词用 head_dim =8 长度为 8 的向量表达
v = v.reshape(B, self.num_heads, C//self.num_heads, -1).transpose(-1, -2)
#(B,C,H‘,W’)--reshape-->(B,h,d,H'W')--transpose-->(B,h,H'W',d)
# reshape & transpose 后的 v.shape = torch.Size([1, 8, 16, 8])
attn = (q @ k) * self.scale
# 对qk计算注意力矩阵: (B,h,HW,d) @ (B,h,d,H'W') = (B,h,HW,H'W')
# q和 kv 的来源可以不同,形状也可以不同,但是 kv 的来源必须一致,且形状相同,最后的 attn 输出形状必须和 q 保持一致
# q.shape = torch.Size([1, 8, 49, 8]) 49 个词
# k.shape = torch.Size([1, 8, 8, 16]) 16 个词
# v.shape = torch.Size([1, 8, 16, 8])
# attn.shape = torch.Size([1, 8, 49, 16])
# QK^T = attn.shape = torch.Size([1, 8, 49, 16]) 这 49 个词 对应的与 16 个词之间 两两的相关性(pixel之间的相关性)
# heads=8,是分成了 8 份,不相交的 8 份,一起学习相关性(表示更多多样化)
# 为注意力矩阵添加位置编码
if relative_pos_enc is not None:
# relative_pos_enc = None,默认为 None,而且也没有传进来,所以不执行 if 语句
# def forward(self, x, relative_pos_enc=None):
if attn.shape[2:] != relative_pos_enc.shape[2:]:
relative_pos_enc = F.interpolate(relative_pos_enc, size=attn.shape[2:],
mode='bicubic', align_corners=False)
attn = attn + relative_pos_enc
attn = torch.softmax(attn, dim=-1)
# 对注意力矩阵进行归一化
# 对 QK^T = attn.shape = torch.Size([1, 8, 49, 16]),16 这个维度进行归一化,相当于 LayerNorm
attn = self.attn_drop(attn)
x = (attn @ v).transpose(-1, -2)
# 通过注意力矩阵对value进行加权: (B,h,HW,H'W') @ (B,h,H'W',d) = (B,h,HW,d);
# (B,h,HW,d)--transpose-->(B,h,d,HW)
# 对 value 进行加权 :v.shape = torch.Size([1, 8, 16, 8])
# QK^T = attn.shape = torch.Size([1, 8, 49, 16])
# Q.shape = torch.Size([1, 8, 49, 8])
# x.shape = 1,8,49,8 与 q 的形状相同,但这次是画了重点的 q
return x.reshape(B, C, H, W)
# 对x进行reshape,重塑为与输入相同的shape: (B,h,HW,d) --> (B, C, H, W)
# 注意力机制作用在每个像素上
if __name__ == '__main__':
# (B,C,H,W)
x = torch.randn(1, 64, 7, 7)
Model = OSRAttention(dim=64)
out = Model(x)
# print(out.shape)
对于 2 维图像来说,Linear 就相当于 1×1 的卷积
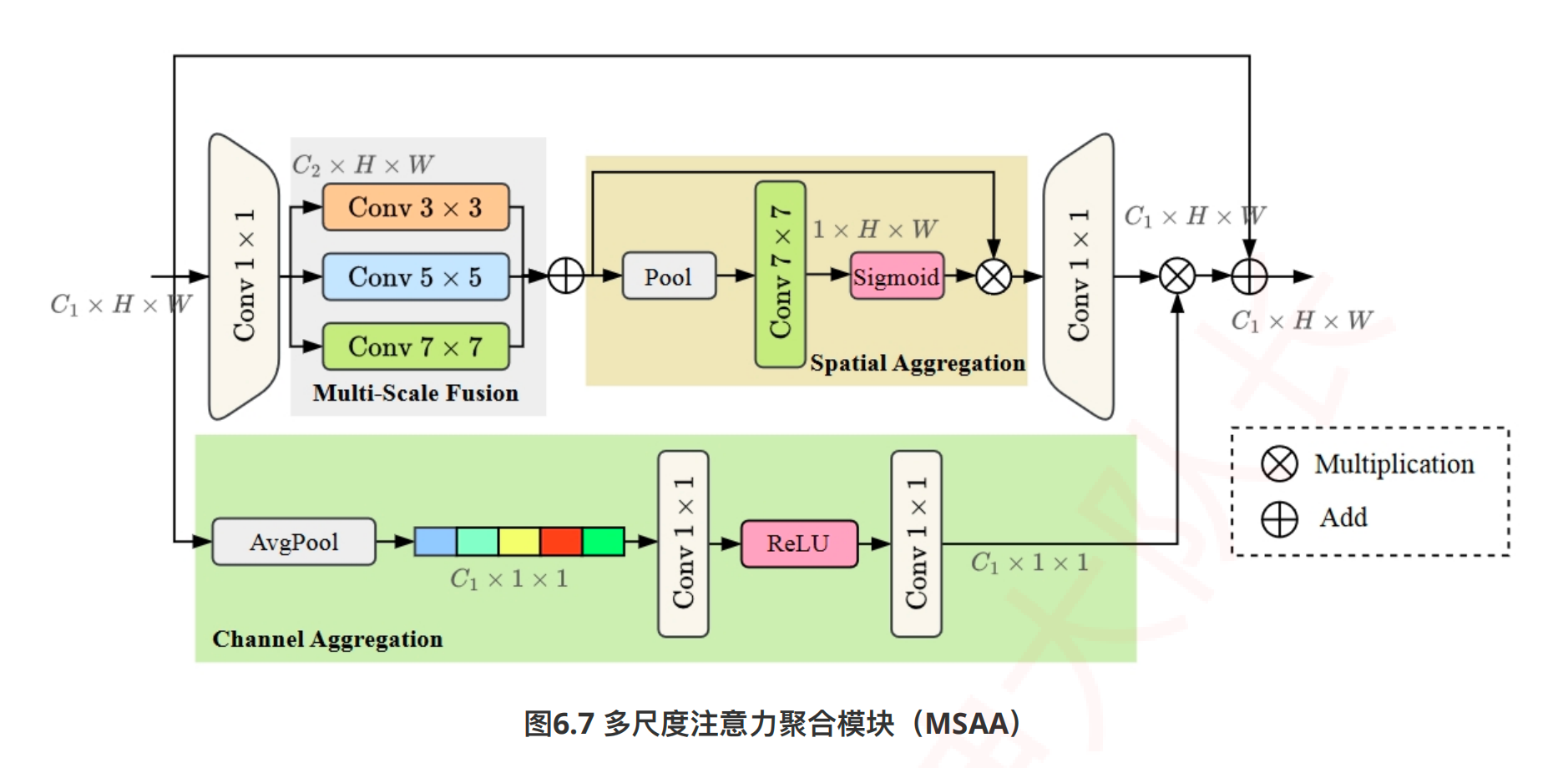
多尺度注意力聚合¶
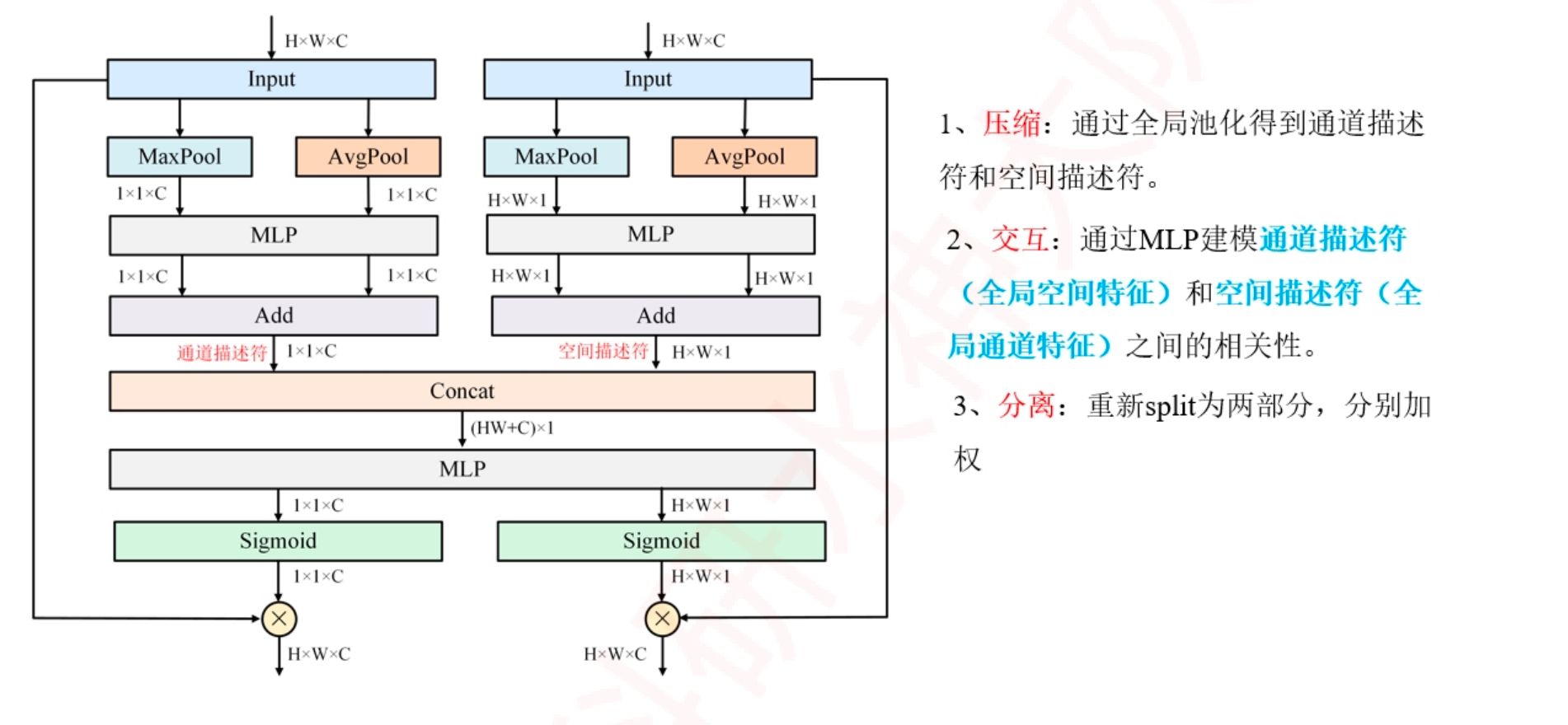
融合通道表示的空间注意⼒¶
Python
import numpy as np
import torch
from torch import nn
from torch.nn import init
"CBAM: Convolutional Block Attention Module "
class ChannelAttention(nn.Module):
def __init__(self, channel, reduction=16):
super().__init__()
self.maxpool = nn.AdaptiveMaxPool2d(1)
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.se = nn.Sequential(
nn.Conv2d(channel, channel // reduction, 1, bias=False),
nn.ReLU(),
nn.Conv2d(channel // reduction, channel, 1, bias=False)
)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
max_result = self.maxpool(x) # 通过最大池化压缩全局空间信息: (B,C,H,W)--> (B,C,1,1)
avg_result = self.avgpool(x) # 通过平均池化压缩全局空间信息: (B,C,H,W)--> (B,C,1,1)
max_out = self.se(max_result) # 共享同一个MLP: (B,C,1,1)--> (B,C,1,1)
avg_out = self.se(avg_result) # 共享同一个MLP: (B,C,1,1)--> (B,C,1,1)
output = max_out + avg_out # (B,C,1,1)
return output
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super().__init__()
self.conv = nn.Conv2d(2, 1, kernel_size=kernel_size, padding=kernel_size // 2)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# x:(B,C,H,W)
max_result, _ = torch.max(x, dim=1, keepdim=True) # 通过最大池化压缩全局通道信息:(B,C,H,W)-->(B,1,H,W); 返回通道维度上的: 最大值和对应的索引.
avg_result = torch.mean(x, dim=1, keepdim=True) # 通过平均池化压缩全局通道信息:(B,C,H,W)-->(B,1,H,W); 返回通道维度上的: 平均值
result = torch.cat([max_result, avg_result], 1) # 在通道上拼接两个矩阵:(B,2,H,W)
output = self.conv(result) # 然后重新降维为1维:(B,1,H,W); 在这里并没有按照模型里的的方式先MLP,然后再Add; 而是先concat,再Conv; 实际含义是一致的,就是实现方式不一致。
return output
class CBAMBlock(nn.Module):
def __init__(self, channel=512, reduction=16, kernel_size=49, HW=None):
super().__init__()
self.ChannelAttention = ChannelAttention(channel=channel, reduction=reduction)
self.SpatialAttention = SpatialAttention(kernel_size=kernel_size)
self.joint_channel = channel + HW
self.MLP = nn.Sequential(
nn.Conv2d(self.joint_channel, channel // reduction, 1, bias=False),
nn.ReLU(),
nn.Conv2d(channel // reduction, self.joint_channel, 1, bias=False)
)
self.sigmoid = nn.Sigmoid()
def init_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
init.constant_(m.weight, 1)
init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
init.normal_(m.weight, std=0.001)
if m.bias is not None:
init.constant_(m.bias, 0)
def forward(self, x):
# (B,C,H,W)
B, C, H, W = x.size()
residual = x
Channel_x = self.ChannelAttention(x).reshape(B,C,1,1) # (B,C,1,1)-->(B,C,1,1)
Spatial_x = self.SpatialAttention(x).reshape(B,H*W,1,1) # (B,1,H,W)-->(B,HW,1,1)
# 拼接,然后通过MLP建立相关性
CS_x = torch.cat([Channel_x, Spatial_x], 1) # (B,C,1,1)-Conca->(B,HW,1,1)-->(B,C+HW,1,1)
CS_xx = self.MLP(CS_x) # (B,C+HW,1,1)-降维->(B,M,1,1)-升维->(B,C+HW,1,1)
# 拆分,然后通过sigmoid得到权重表示
Channel_x = CS_xx[:,:C,:].reshape(B,C,1,1) # (B,C,1,1)-->(B,C,1,1)
Spatial_x = CS_xx[:,C:,:].reshape(B,1,H,W) # (B,HW,1,1)-->(B,1,H,W)
Channel_weight = self.sigmoid(Channel_x)
Spatial_weight = self.sigmoid(Spatial_x)
# 分别得到通道和空间权重之后,既可以单独相乘得到两个输出, 也可以一块与X相乘得到一个输出,视自己的任务来定义
out1 = x * Channel_weight # 将输入与通道注意力权重相乘: (B,C,H,W) * (B,C,1,1) = (B,C,H,W)
out2 = x * Spatial_weight # 将更新后的输入与空间注意力权重相乘:(B,C,H,W) * (B,1,H,W) = (B,C,H,W)
return out1,out2
if __name__ == '__main__':
# (B,C,H,W) 注意: 因为在模型中需要将HW和C拼接起来,所在在输入到模型的时候,最好把通道C和HW做个降维(池化、下采样均可),然后在输入到模型中去,输出之后再恢复shape就可以了!
input = torch.randn(1, 64, 7, 7)
B,C,H,W=input.shape
Model = CBAMBlock(channel=64, reduction=8, kernel_size=7, HW=H*W)
out1,out2 = Model(input)
print(out1.shape,out2.shape)